Online Camera-LiDAR Calibration with Sensor Semantic Information论文阅读
本文可谓是大道至简,利用语义特征代替边缘特征进行相机和激光雷达联合标定。这篇论文基于Automatic-Online-Calibration-of-Cameras-and-Lasers进行改进,主要做出了一下贡献:
- 利用语义特征代替边缘特征,提升方法的整个鲁棒性
- 将非线性优化方法用于离散采样的目标函数
点云处理
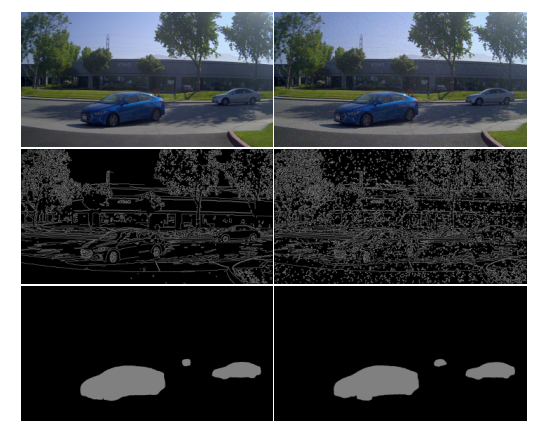
这篇文章没有提到怎么处理点云,只是非常简单的提了一句。直接使用的是经过分类的点云,因为这篇文章重点提到的行驶中的车辆,打算利用行驶中的车辆来做一个联合标定。所以大概是从原始点云中利用点云分割分割出车辆的点云,然后进行之后的图像采样。
图像信息处理
文章使用PSPNet来对图像进行处理,以得到图像的语义信息。
对于语义得到的结果进行处理,车辆语义内部进行逆距离变换(为了加强局部最优性的唯一性),外部不变,处理方法如下:
处理结果如下: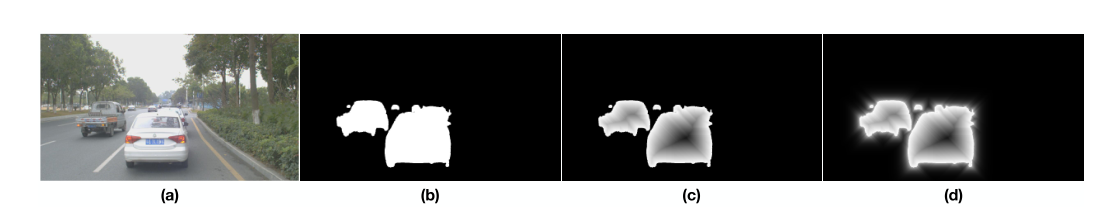
目标函数还是在经过投影在经过处理后的图像上进行采样。
非线性优化算法
看过上一篇文章中论文的都知道,他是在六个变换变量中进行扰动,然后选取目标值更大的方向进行移动,这样做的结果就是很可能达到局部最优解,当然文章最后也给出了一些方法来解决这一困境。这篇文章将非线性优化的方法应用到离散采样得到的目标函数。整体算法如下:
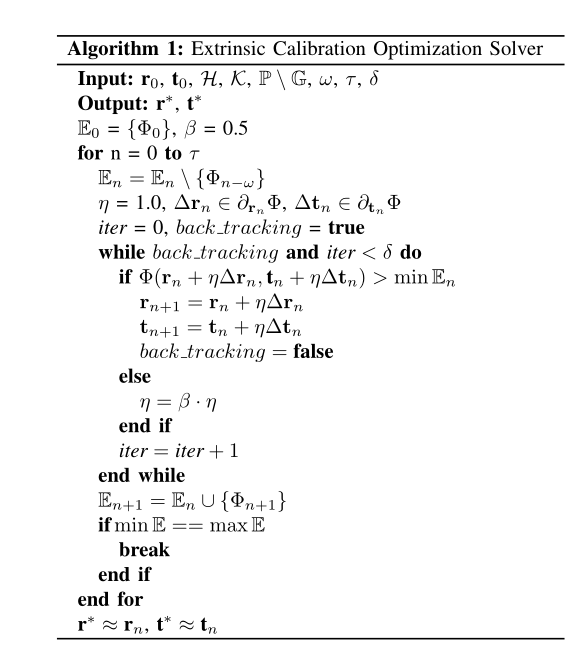
他这里是用次微分得到的结果然后选取坐标上升方向进行优化,(次微分次梯度看这里)。一般来说,我们只要线性搜索大于当前目标值就可以进行迭代了,但是很可能陷入到局部最优的环境。这里的回溯算法加上窗口滑动算法缓解了这一问题,建议看一下。